
一、参心坐标系与地心坐标系
1.1 参心坐标系reference-ellipsoid-centric coordinate system
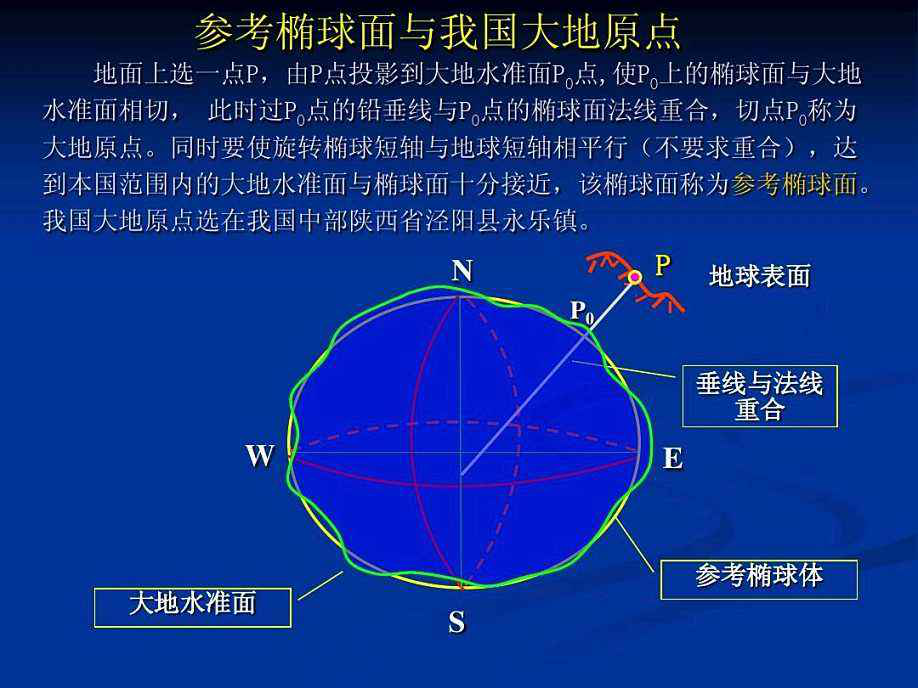
是以参考椭球的几何中心为原点的大地坐标系。“参心”意指参考椭球的中心。
通常分为:参心空间直角坐标系(以x,y,z为其坐标元素)和参心大地坐标系(以B,L,H为其坐标元素)。参心坐标系是在参考椭球内建立的O-XYZ坐标系。原点O为参考椭球的几何中心,X轴与赤道面和首子午面的交线重合,向东为正。Z轴与旋转椭球的短轴重合,向北为正。Y轴与XZ平面垂直构成右手系。在测量中,为了处理观测成果和传算地面控制网的坐标,通常须选取一参考椭球面作为基本参考面,选一参考点作为大地测量的起算点(大地原点),利用大地原点的天文观测量来确定参考椭球在地球内部的位置和方向。
参心大地坐标的应用十分广泛,它是经典大地测量的一种通用坐标系。根据地图投影理论,参心大地坐标系可以通过高斯投影计算转化为平面直角坐标系,为地形测量和工程测量提供控制基础。由于不同时期采用的地球椭球不同或其定。
北京54、西安80及常见的地方坐标系均为参心坐标系。
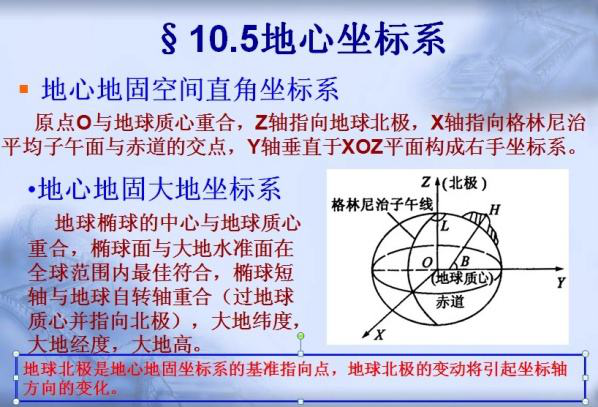
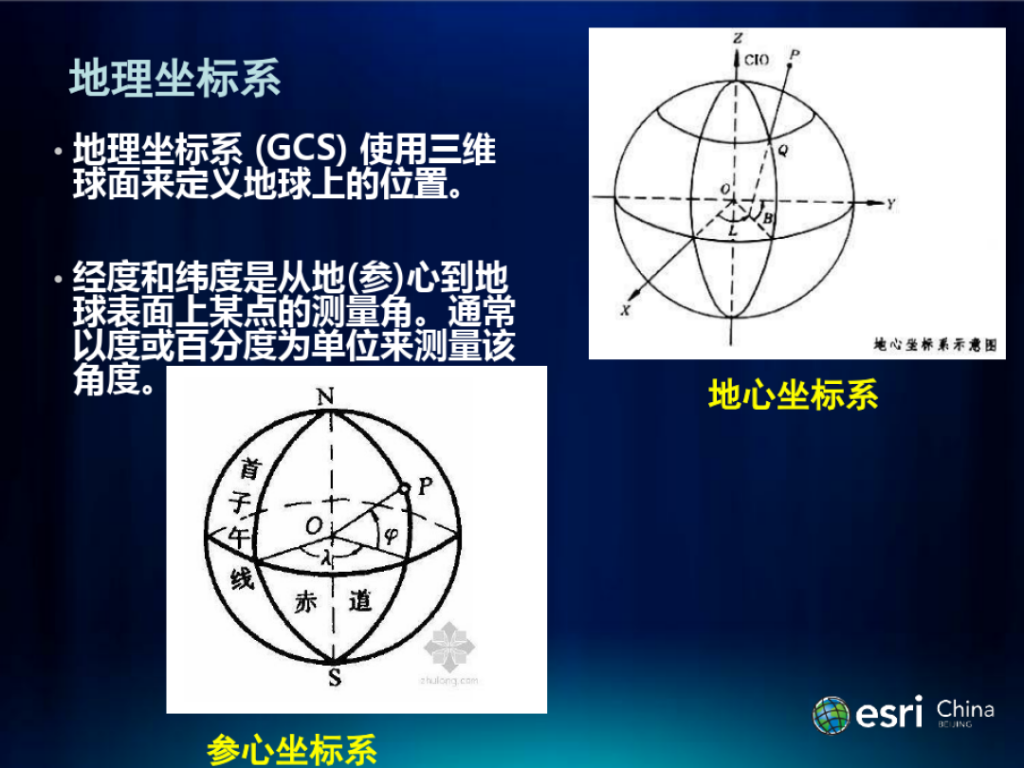
1.2 地心坐标系geocentric coordinate system
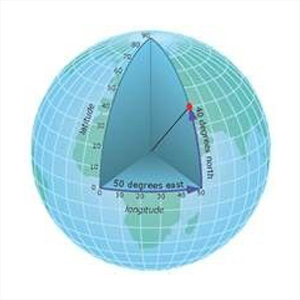
以地球质心为原点建立的空间直角坐标系,或以球心与地球质心重合的地球椭球面为基准面所建立的大地坐标系。
以地球质心(总椭球的几何中心)为原点的大地坐标系。通常分为地心空间直角坐标系(以x,y,z为其坐标元素)和地心大地坐标系(以B,L,H为其坐标元素)。地心坐标系是在大地体内建立的O-XYZ坐标系。原点O设在大地体的质量中心,用相互垂直的X,Y,Z三个轴来表示,X轴与首子午面与赤道面的交线重合,向东为正。Z轴与地球旋转轴重合,向北为正。Y轴与XZ平面垂直构成右手系。
20世纪50年代之前,一个国家或一个地区都是在使所选择的参考椭球与其所在地区的大地水准面最佳拟合的条件下,按弧度测量方法来建立各自的局部大地坐标系的。由于当时除海洋上只有稀疏的重力测量外,大地测量工作只能在各个大陆上进行,而各大陆的局部大地坐标系间几乎没有联系。不过在当时的科学发展水平上,局部大地坐标系已能基本满足各国大地测量和制图工作的要求。但是,为了研究地球形状的整体及其外部重力场以及地球动力现象,特别是50年代末,人造地球卫星和远程弹道武器出现后,为了描述它们在空间的位置和运动,以及表示其地面发射站和跟踪站的位置,都必须采用地心坐标系。因此,建立全球地心坐标系(也称为世界坐标系)已成为大地测量所面临的迫切任务。
WGS-84、CGCS2000,都是属于地心坐标系。
二、我国常用的坐标系
2.1 北京54坐标系
北京54坐标系(BJZ54)是指北京54坐标系为参心大地坐标系,大地上的一点可用经度L54、纬度B54和大地高H54定位,它是以克拉索夫斯基椭球为基础,经局部平差后产生的坐标系。
新中国成立以后,我国采用了前苏联的克拉索夫斯基椭球参数,并与前苏联1942年坐标系进行联测,通过计算建立了我国大地坐标系,定名为1954年北京坐标系。因此,1954年北京坐标系可以认为是前苏联1942年坐标系的延伸。它的原点不在北京而是在前苏联的普尔科沃。它是将我国一等锁与原苏联远东一等锁相连接,然后以连接处呼玛、吉拉宁、东宁基线网扩大边端点的原苏联1942年普尔科沃坐标系的坐标为起算数据,平差我国东北及东部区一等锁,这样传算过来的坐标系就定名为1954年北京坐标系。
北京54采用Krassovsky 椭球参数为:
长半轴a=6378245m;
短半轴=6356863.0188m;
扁率α=1/298.3;
第一偏心率平方=0.006693421622966
第二偏心率平方=0.006738525414683
2.2 1980西安坐标系
1978年4月在西安召开全国天文大地网平差会议,确定重新定位,建立我国新的坐标系。为此有了1980年国家大地坐标系。1980年国家大地坐标系采用地球椭球基本参数为1975年国际大地测量与地球物理联合会第十六届大会推荐的数据。
该坐标系的大地原点设在我国中部的陕西省泾阳县永乐镇,位于西安市西北方向约60公里,故称1980年西安坐标系,又简称西安大地原点。
基准面采用青岛大港验潮站1952-1979年确定的黄海平均海水面(即1985国家高程基准)。
西安80采用的地球椭球基本参数为1975年国际大地测量与地球物理联合会第十六届大会推荐的数据,即IAG 75地球椭球体。IAG 75椭球的参数为:长轴6378140m,短轴6356755m,扁率1/298.25722101。
在建立C80坐标系时有以下先决条件:
椭球参数采用IUG 1975年大会推荐的参数因而可得C80椭球两个最常用的几何参数为:
长半轴a=6378140±5(m)
短半轴b=6356755.2882m
扁 率α=1/298.2570
第一偏心率平方=0.00669438499959
第二偏心率平方=0.00673950181947
西安80与北京54的区别:
西安80坐标系与北京54坐标系其实是一种椭球参数的转换作为这种转换在同一个椭球里的转换都是严密的,而在不同的椭球之间的转换是不严密,因此不存在一套转换参数可以全国通用的,在每个地方会不一样,因为它们是两个不同的椭球基准。
北京54和西安80是两种不同的大地基准面,不同的参考椭球体,因而两种地图下,同一个点的坐标是不同的,无论是三度带六度带坐标还是经纬度坐标都是不同的。
2.3 CGCS2000
CGCS2000是2000国家大地坐标系,属于地心大地坐标系统,该系统以ITRF 97 参考框架为基准, 参考框架历元为2000.0。
该坐标系是通过中国GPS 连续运行基准站、 空间大地控制网以及天文大地网与空间地网联合平差建立的地心大地坐标系统。2000(中国)国家大地坐标系以ITRF 97 参考框架为基准, 参考框架历元为2000.0。
2000国家大地坐标系的大地测量基本常数分别为:
长半轴 a = 6 378 137 m;
地球引力常数 GM =3.986004418×1014m3s-2;
扁率f = 1/ 298. 257 222 101;
地球自转角速度X =7.292115×10-5rad s-1
20世纪50年代,为满足测绘工作的迫切需要 ,中国采用 了1954年北京坐标系。1954年之后,随着天文大地网布设任务的完成,通过天文大地网整体平差,于20世纪80年代初中国又建立了1980西安坐标系。随着情况的变化和时间的推移,上述两个以经典测量技术为基础的局部大地坐标系,已经不能适应科学技术特别是空间技术发展,不能适应中国经济建设和国防建设需要。中国大地坐标系的更新换代,是经济建设、国防建设、社会发展和科技发展的客观需要。
以地球质量中心为原点的地心大地坐标系,是21世纪空间时代全球通用的基本大地坐标系。以空间技术为基础的地心大地坐标系,是中国新一代大地坐标系的适宜选择。地心大地坐标系可以满足大地测量、地球物理、天文、导航和航天应用以及经济、社会发展的广泛需求。历经多年,中国测绘、地震部门和科学院有关单位为建立中国新一代大地坐标系作了大量基础性工作,20世纪末先后建成全国 GPS一、二级网,国家GPS A、B级网,中国地壳运动观测网络和许多地壳形变网,为地心大地坐标系的实现奠定了较好的基础。
国家2000与WGS-84的区别
CGCS2000的定义与WGS84实质一样。采用的参考椭球非常接近。扁率差异引起椭球面上的纬度和高度变化最大达0.1mm。当前测量精度范围内,可以忽略这点差异。可以说两者相容至cm级水平,但若一点的坐标精度达不到cm水平,则不认为CGCS2000和WGS84的坐标是相容的。
国家与北京54和西安80的区别
CGCS2000和1954或1980坐标系,在定义和实现上有根本区别。局部坐标和地心坐标之间的变换是不可避免的。坐标变换通过联合平差来实现,而一边通过一定变换模型来实现。当采用模型变换时,变换模型的选择应依据精度要求而定。对于高精度(好于0.5m)要求,可采用最小曲率法或其他方法的格网模型,对于中等精度(0.5~5m)要求,可采用七参数模型,对于低精度(5~10m)要求,可采用四参数或者三参数模型。
三、地图投影
3.1 地图投影的概念
地图投影是利用一定数学法则把地球表面的经、纬线转换到平面上的理论和方法。
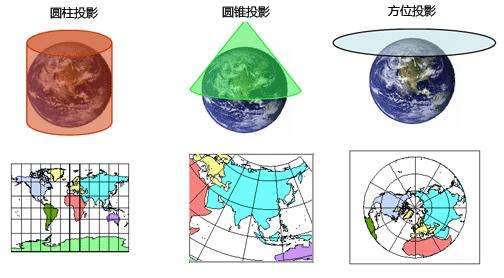
由于地球是一个赤道略宽两极略扁的不规则的梨形球体,故其表面是一个不可展平的曲面,所以运用任何数学方法进行这种转换都会产生误差和变形,为按照不同的需求缩小误差,就产生了各种投影方式。
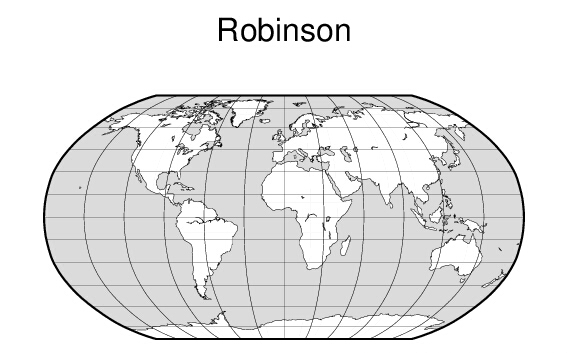
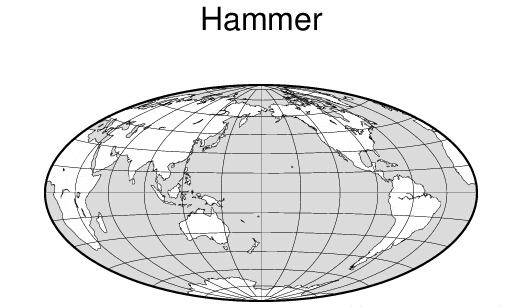
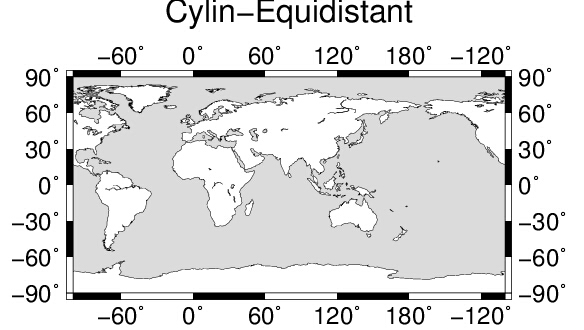
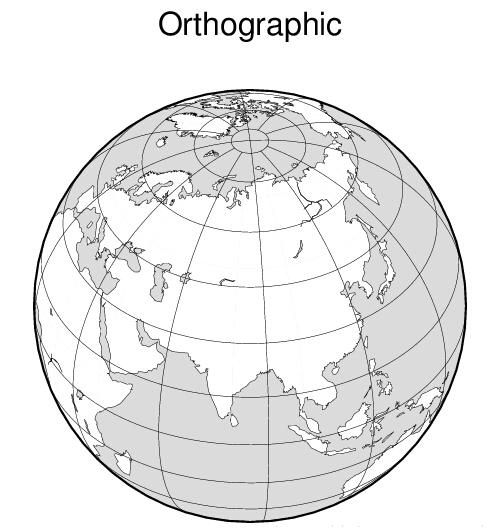
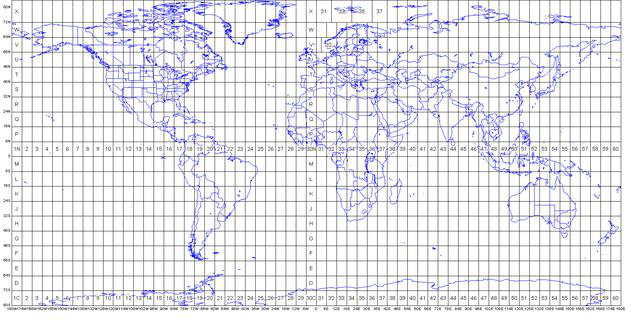
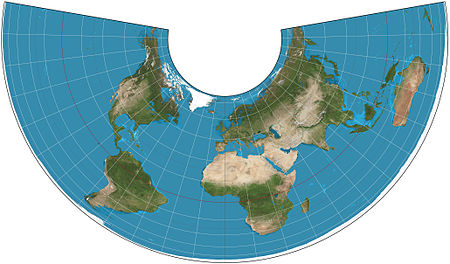
3.2 几种不同投影方式下的世界地图
3.3 常见的投影方式
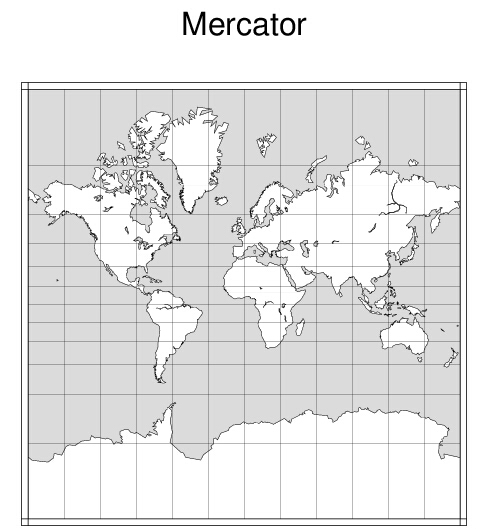
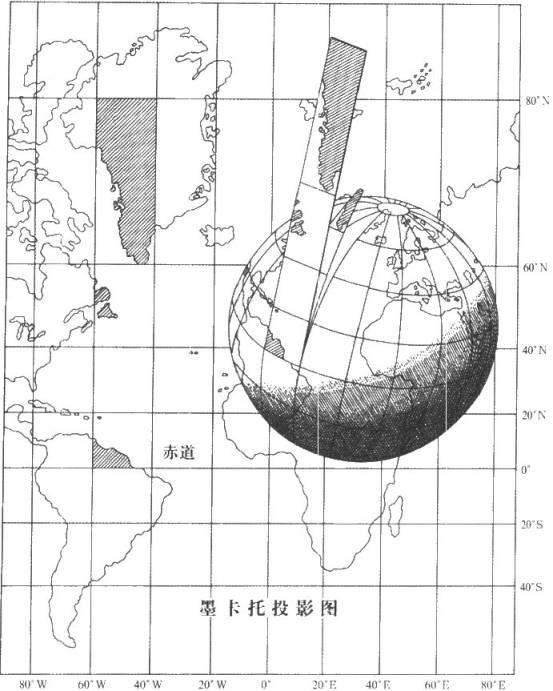
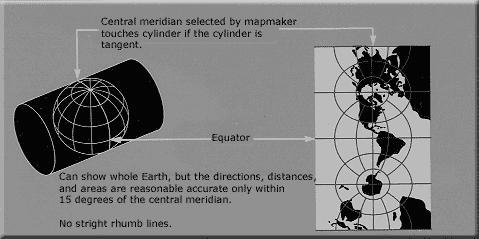
3.3.1 墨卡托(Mercator)投影
墨卡托(Mercator)投影,是一种”等角正切圆柱投影”,荷兰地图学家墨卡托在1569年拟定, 假设地球被围在一中空的圆柱里,其标准纬线与圆柱相切接触,然后再假想地球中心有一盏灯,把球面上的图形投影到圆柱体上,再把圆柱体展开,这就是一幅选定标准纬线上的“墨卡托投影”绘制出的地图。 墨卡托投影没有角度变形,由每一点向各方向的长度比相等,它的经纬线都是平行直线,且相交成直角,经线间隔相等,纬线间隔从标准纬线向两极逐渐增大。墨卡托投影的地图上长度和面积变形明显,但标准纬线无变形,从标准纬线向两极变形逐渐增大,但因为它具有各个方向均等扩大的特性,保持了方向和相互位置关系的正确。
在地图上保持方向和角度的正确是墨卡托投影的优点,墨卡托投影地图常用作航海图和航空图,如果循着墨卡托投影图上两点间的直线航行,方向不变可以一直到达目的地,因此它对船舰在航行中定位、确定航向都具有有利条件,给航海者带来很大方便。 “海底地形图编绘规范”中规定1:25万及更小比例尺的海图采用墨卡托投影,其中基本比例尺海底地形图(1:5万,1:25万,1: 100万)采用统一基准纬线30°,非基本比例尺图以制图区域中纬为基准纬线。基准纬线取至整度或整分。

墨卡托投影对透视圆筒投影改造点:要使圆筒投影称为等角的性质,必须使由赤道向两极经线逐渐伸长的倍数与经线上各点相应的纬度扩大的倍数相同。
从上图中可以看出,X轴的刻度是等距的,Y轴方向越靠近两极变形越大。假设墨卡托投影的坐标系原点为(0,lambda_0) ,表示X轴为赤道,Y轴则在经度为lambda_0处垂直于赤道。 墨卡托投影公式即为:
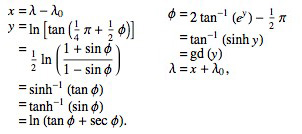
其中,lambda 为经度, phi 为纬度。左侧为正算,右侧为反算。
即有经纬度( phi,lambda)对应的墨卡托平面坐标即为(x*R,y*R)。很明显,y方向的距离只有在赤道附近才是接近实际距离的。
3.3.2 高斯-克吕格(Gauss-Kruger)投影
高斯-克吕格(Gauss-Kruger)投影简称“高斯投影”,又名”等角横切椭圆柱投影”,地球椭球面和平面间正形投影的一种。德国数学家、物理学家、天文学家高斯(Carl FriedrichGauss,1777一 1855)于十九世纪二十年代拟定,后经德国大地测量学家克吕格(Johannes Kruger,1857~1928)于 1912年对投影公式加以补充,故名。
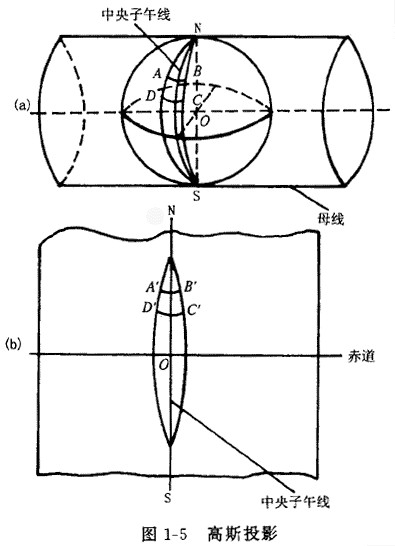
该投影按照投影带中央子午线投影为直线且长度不变和赤道投影为直线的条件,确定函数的形式,从而得到高斯一克吕格投影公式。投影后,除中央子午线和赤道为直线外, 其他子午线均为对称于中央子午线的曲线。设想用一个椭圆柱横切于椭球面上投影带的中央子午线,按上述投影条件,将中央子午线两侧一定经差范围内的椭球面正形投影于椭圆柱面。将椭圆柱面沿过南北极的母线剪开展平,即为高斯投影平面。取中央子午线与赤道交点的投影为原点,中央子午线的投影为纵坐标x轴,赤道的投影为横坐标y轴,构成高斯克吕格平面直角坐标系。
高斯-克吕格投影在长度和面积上变形很小,中央经线无变形,自中央经线向投影带边缘,变形逐渐增加,变形最大之处在投影带内赤道的两端。由于其投影精度高,变形小,而且计算简便(各投影带坐标一致,只要算出一个带的数据,其他各带都能应用),因此在大比例尺地形图中应用,可以满足军事上各种需要,能在图上进行精确的量测计算。
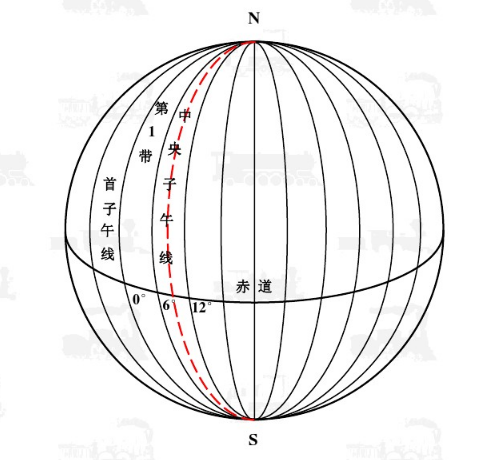
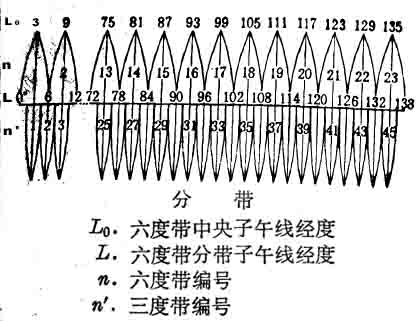
按一定经差将地球椭球面划分成若干投影带,这是高斯投影中限制长度变形的最有效方法。分带时既要控制长度变形使其不大于测图误差,又要使带数不致过多以减少换带计算工作,据此原则将地球椭球面沿子午线划分成经差相等的瓜瓣形地带,以便分带投影。通常按经差6度或3度分为六度带或三度带。六度带自0度子午线起每隔经差6度自西向东分带,带号依次编为第 1、2…60带。三度带是在六度带的基础上分成的,它的中央子午线与六度带的中央子午线和分带子午线重合,即自 1.5度子午线起每隔经差3度自西向东分带,带号依次编为三度带第 1、2…120带。我国的经度范围西起 73°东至135°,可分成六度带十一个,各带中央经线依次为75°、81°、87°、……、117°、123°、129°、135°,或三度带二十二个。六度带可用于中小比例尺(如 1:250000)测图,三度带可用于大比例尺(如 1:10000)测图,城建坐标多采用三度带的高斯投影。
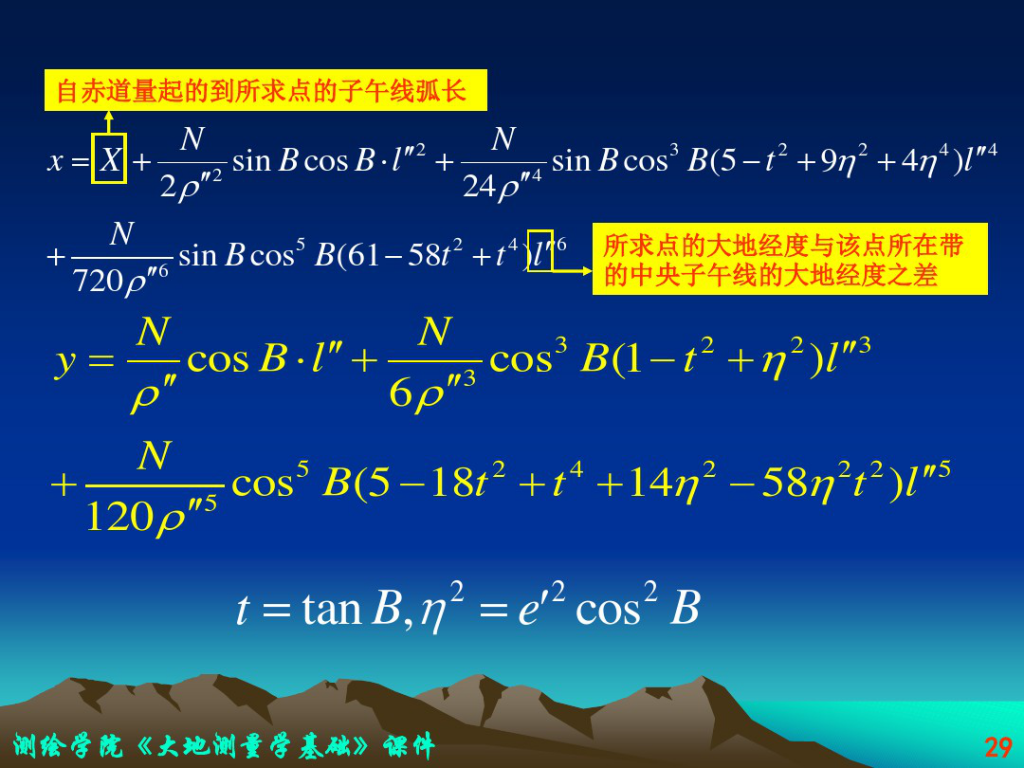
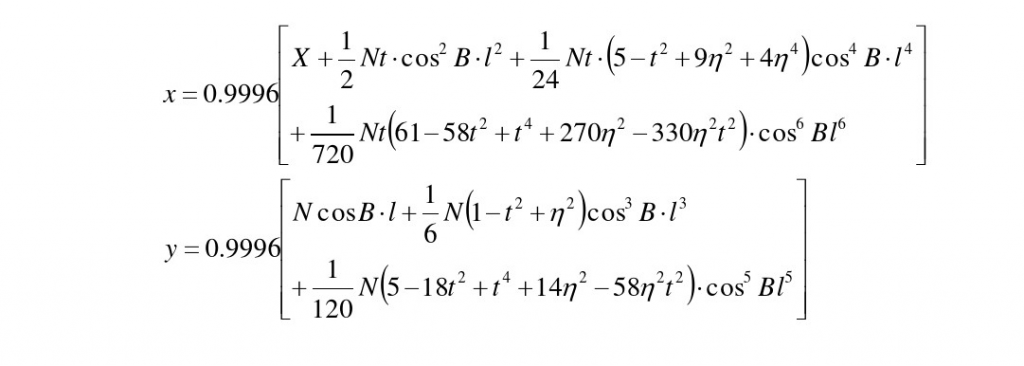
高斯投影正算公式:
高斯投影反算公式:
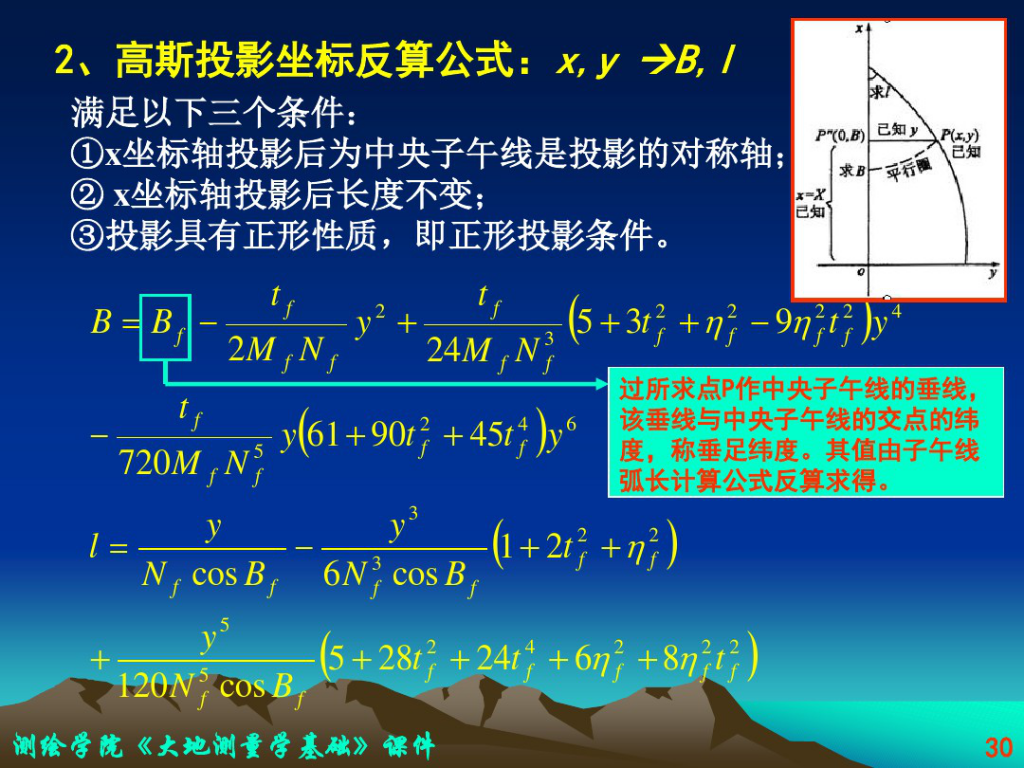
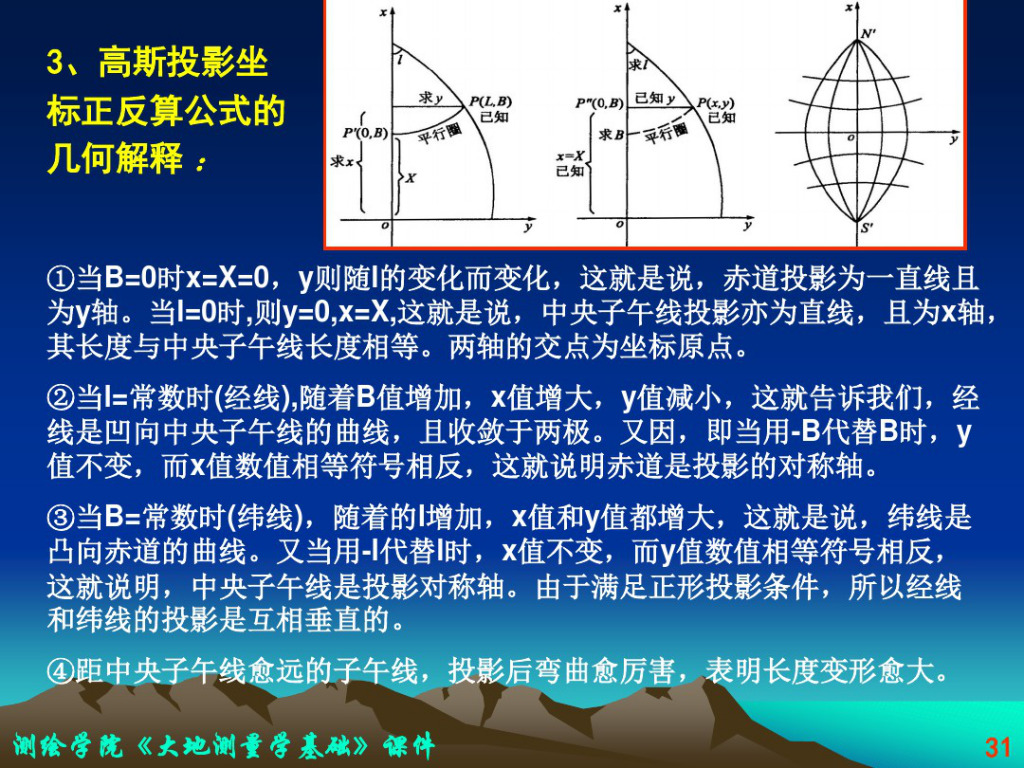
高斯投影坐标正反算公式的几何解释:
3.3.3 通用横轴墨卡托(UTM,Universal Transverse Merecator)投影
与高斯克吕格投影相似,将世界分为60个投影带,每带经差为6°,经度自180°W和174°W之间为起始带,且连续向东计算,带的编号系统与1:100万比例尺地图有关规定是一致的。我国的卫星影像资料通常采用UTM投影。
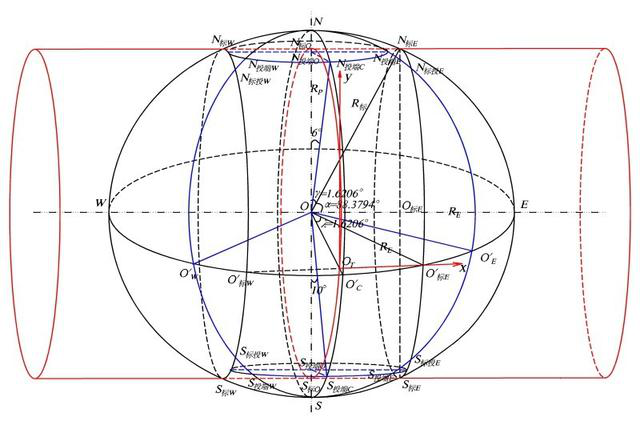
UTM投影为椭圆柱横正轴割地球椭球体,椭圆柱的中心线位于椭球体赤道面上,且通过椭球体质点。从而将椭球体上的点投影到椭圆柱上。两条割线圆在UTM投影图上长度无变,即2条标准经线圆。两条割线圆之正中间为中央经线圆,中央经线投影后的长度为其投影前的0.9996倍,比例因子k=投影后的长度/投影前的实际长度。则标准割线和中央经线的经度差为1.6206°,即1°37′14.244″。
UTM 经度区范围为1到60,其中58个区的东西跨度为 6°。经度区涵盖了地球中纬度范围从 80°S 到 84°N 之间的所有区域。一共有 20个UTM 纬度区,每个区的南北跨度为 8°;使用字母 C 到 X 标识(其中没有字母 I 和 O)。A、B、Y、Z 区不在系统范围以内,它们覆盖了南极和北极区。
高斯克吕格投影与UTM投影的区别:
高斯-克吕格投影与UTM投影都是横轴墨卡托投影的变种。
从投影几何方式看,高斯-克吕格投影是“等角横切椭圆柱投影”,投影后中央经线保持长度不变,即比例系数为1;UTM投影是“等角横轴割圆柱投影”,圆柱割地球于南纬80度、北纬84度两条等高圈,投影后两条割线上没有变形,中央经线上长度比 0.9996。
从计算结果看,两者主要差别在比例因子上,高斯-克吕格投影中央经线上的比例系数为1,UTM投影为0.9996,高斯-克吕格投影与UTM投影可近似采用 X[UTM]=0.9996 * X[高斯],Y[UTM]=0.9996 * Y[高斯],进行坐标转换(注意:如坐标纵轴西移了500000米,转换时必须将Y值减去500000乘上比例因子后再加500000)。从分带方式看,两者的分带起点不同,高斯-克吕格投影自0度子午线起每隔经差6度自西向东分带,第1带的中央经度为3°;UTM投影自西经180°起每隔经差6度自西向东分带,第1带的中央经度为-177°,因此高斯-克吕格投影的第1带是UTM的第31带。此外,两投影的东伪偏移(False_Easting)都是500公里,高斯-克吕格投影北伪偏移(False_Northing)为零,UTM北半球投影北伪偏移(False_Northing)为零,南半球则为10000公里。
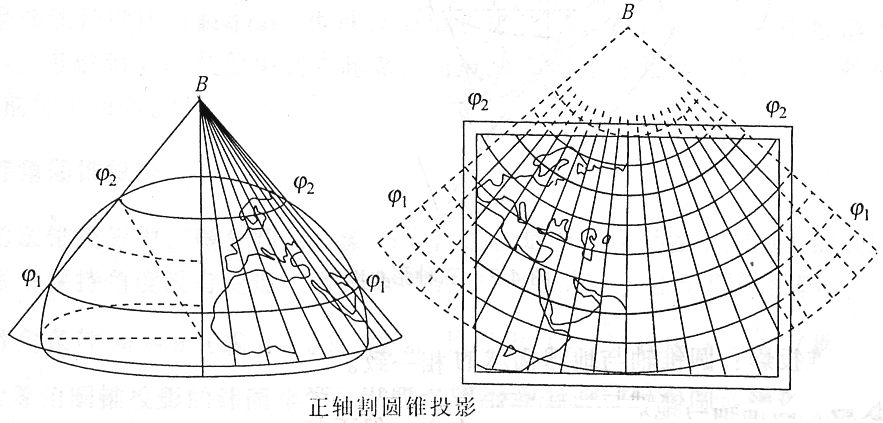
3.3.4 兰伯特Lambert投影(正轴等角割圆锥投影)
– 适用于小于1:100万(包括1:100万)的地图。
– 最适用于中纬度的一种投影。它类似于Albers投影,不同之处在于其描绘形状比描绘面积更准确。
– 由于我国位于中纬度地区,中国地图和分省地图经常采用割圆锥投影(Lambert或Albers投影):
中国地图的中央经线常位于东经105度
两条标准纬线分别为北纬25度和北纬47度
– 各省的参数可根据地理位置和轮廓形状初步加以判定。例如甘肃省的参数为:
中央经线为东经101度
两条标准纬线分别为北纬34度和41度
– 投影方法:
圆锥投影通常基于两条标准纬线,从而使其成为割投影。超过标准纬线的纬度间距将增加。这是唯一常用的将两极表示为单个点的圆锥投影。
也可使用单条标准纬线和比例尺因子定义。如果比例尺因子不等于1.0,投影实际上将变成割投影。
3.3.5 阿伯斯Albers投影(正轴等积割圆锥投影)
– 也称“双标准纬线等积圆锥投影”,为阿伯斯(Albers)拟定。投影区域面积保持与实地相等。
– 最适合于东西方向分布的大陆板块,不适合南北方向分布的大陆板块。
– 在处理显示400万、100万的全国数据时为了保持等面积特性,经常采用Albers投影。
上图为Albers投影的世界地图
四、坐标转换
4.1 简介
坐标转换是空间实体的位置描述,是从一种坐标系统变换到另一种坐标系统的过程。通过建立两个坐标系统之间一一对应关系来实现。通常坐标转换有平移、缩放、旋转三个方面的转换。本文只详细讲述关于旋转部分的内容。
坐标转换的过程涉及到空间坐标、平面坐标及投影。
1)三维转换:不同椭球体间转换,例如:WGS84<——>北京54, WGS84<——>西安54, 西安54<——>北京54。常采用七参数法、三参数法。
2)二维转换:同一椭球体下转换,如:北京54<——>地方坐标(该地方坐标是基于北京54建立的),常采用四参数法。
不同椭球体的坐标转换,需要用空间直角坐标来计算,采用三参数(1个点)或七参数(3个点);同一椭球体的坐标转换,基于高斯平面坐标来计算,采用四参数(2个点),如果公共点多可以采用最小二乘法拟合,求取最佳参数。
以WGS84坐标转地方坐标系为例,其流程为:WGS84——>北京54——>地方坐标,详细步骤如下:
1)(B,L,H)84——(X,Y,Z)84,空间大地坐标到空间直角坐标的转换。
2)(X,Y,Z)84——(X,Y,Z)54,坐标基准的转换,即Datum转换。通常有三种转换方法:七参数、简化三参数、Molodensky。
3)(X,Y,Z)54——(B,L,H)54,空间直角坐标到空间大地坐标的转换。
4)(B,L)54——(x,y)54, 高斯投影正算。
5)(x,y)54——(x0,y0)54,地方坐标转换,常用四参数法。
上述1-5步骤中,所有的转换公式都是公开的,但是转换参数有些是公开的,有些是非公开的。
公开参数步骤:1、3、4步骤需要的参数都是公开的。
待解参数步骤:2、4的参数是非公开的,需要找测绘部门去转换申请,或利用同名点求取转换的参数,步骤2,采用三参数(1个点)或七参数(3个点);步骤4,采用四参数(2个点),如果同名点多可以采用最小二乘法拟合,求取最佳参数。
坐标转换公开的参数:同一空间坐标系统,大地坐标和直角坐标的转换,空间坐标进行变换为投影坐标的参数。
坐标转换非公开的参数:不同空间坐标系统,各坐标之间的转化。
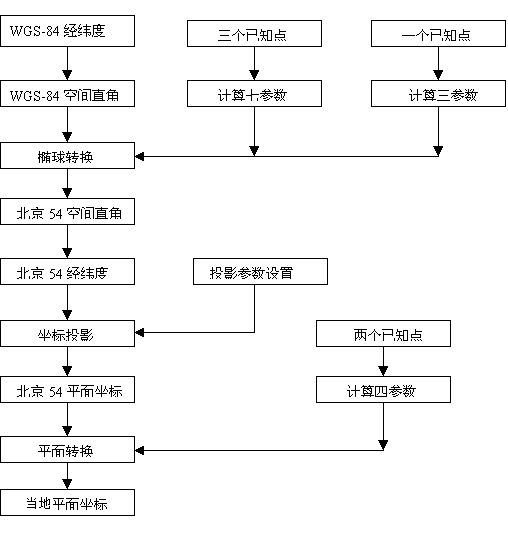
WGS84坐标转地方坐标流程图
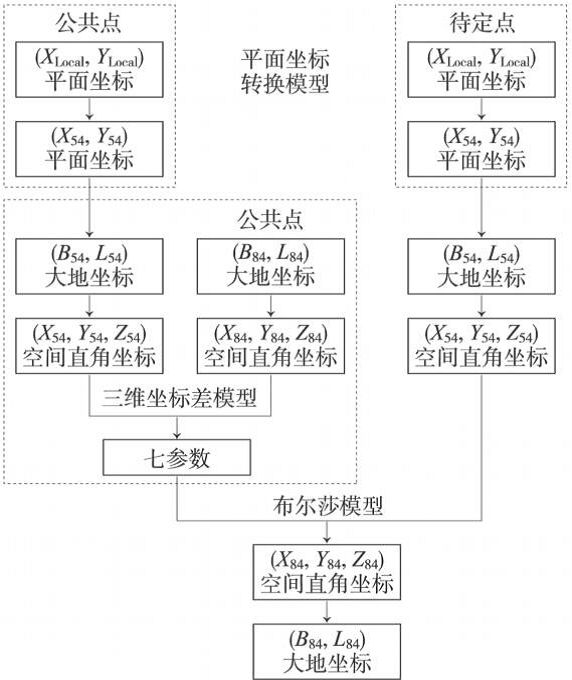
地方坐标转大地坐标流程图(蒋小军,2010)
4.2 七参数椭球转换
七参数主要分为3类参数,旋转、缩放和平移。
缩放,表示为k,主要是由于测量误差产生的;
平移为3个坐标轴方向上的平移,表示为dX、dY、dZ,这是由于原点不一样产生的;
旋转为3个坐标轴的旋转,表示为rX、rY、rZ,这是坐标轴指向不一致产生的。
平移的单位为对应的长度单位,我们常用米;旋转的单位为秒,原因是各个坐标系间指向的差异都很小;缩放的单位是PPM(part(s) per million,百万分之一),也就是说缩放是一个特别小的数值,这是因为坐标转换前我们都会率先统一单位,所以缩放数值也就体现了测量误差等因素的影响。
以WGS84 坐标系与1980 年国家大地坐标系的转换为例:
如果用七参数法来实现,求解前必须确定控制网中各点对的距离。如果两点间距离超过15 公里,必须考虑曲面因素即两种不同坐标系的椭球参数,避免因椭球的差异,导致转换后所得坐标残差过大,精度过低,为了保证精度必须采用七参数法。如果两点的距离小于10 公里,曲面因素影响几乎可以忽略,所以采用四参数等精度较低的转换方法来转换。
七参数转换主要有以下方法:
①通过卫星定位接收机测得WGS-84 大地坐标并转换至西安80 大地坐标,再通过高斯投影将西安80 的大地坐标转换到西安80 平面直角坐标。
②通过卫星定位接收机测得WGS-84 大地坐标,先以高斯投影将其变换至同椭球下的平面直坐标X、Y、h84,之后在平面坐标系中将WGS84 下的平面坐标转换成西安80 平面直角坐标。
方法一采用的是不同大地坐标系的转换模型,七参数包括3个旋转参数、3 个平移参数和1 个尺度参数,但是考虑到两种大地坐标的椭球参数的不同,为了提高精度,减少不同椭球引起的变化,还需要增加两个变换参数。
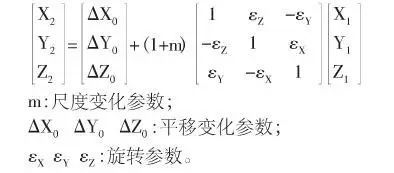
方法二的原理是不同空间直角坐标系的转换模型,通常采用布尔沙(Bursa)模型,参数由3 个平移参数、3 个旋转参数和1 个尺度参数组成。通过GNSS 静态观测获得的WGS84大地坐标,通过转换可得同一椭球系的空间直角坐标,再结合其他椭球至少3 个已知控制点成果的公共点,采用间接平差法,通过高斯投影转换为西安80 坐标系大地坐标;最后再转换得到空间直角坐标。七参数转换公式如下:
4.3 三参数椭球转换
三参数坐标转换公式在假设两坐标系间各坐标轴相互平行,轴系间不存在欧勒角的条件下得出的。
布尔莎七参数转换模型是一个严密的转换公式。一般而言,只需已知3 个分布在空间的不同公共点,便能解算出其可靠的转换参数。若公共点分布区域较小,将导致平移参数与旋转参数间的强相关性,使其系数矩阵的条件数变大,从而影响转换参数解的稳定性。
因此,将七参数模型中的旋转参数与缩放比例尺度参数忽略,可得到适用于小区域范围的三参数转换模型:
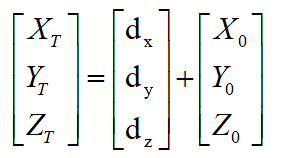
式中,(XT,YT,ZT) 为新坐标系坐标;(X0,Y0,Z0) 为原坐标系坐标;(dx,dy,dz)T 为坐标转换平移参数。该模型只需要一个公共点便可求解出转换的平移参数,若公共点个数大于1,平移参数可设定为公共点坐标的平均值。
一般区域范围不大,最远点间的距离不大于30km(经验值)情况下的坐标转换,可以采用三参数。
4.4 四参数椭球转换
在布尔沙七参数转换的基础上,若只省略3 个旋转参数,可得到布尔莎四参数转换模型:
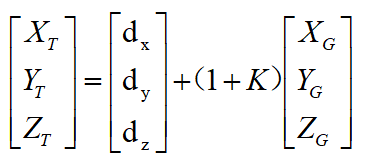
式中,(XT,YT,ZT) 为新坐标系坐标;(XG,YG,ZG) 为原坐标系坐标;(dx,dy,dz)T 为坐标转换时的3 个坐标平移参数;K 为缩放比例尺度参数。该模型只需要2 个公共点便可求解出转换的平移参数。
4.5 平面四参数转换
在一个椭球的不同坐标系中的平面坐标之间转换转换则会用到平面转换。目前一般分为四参数和平面网格拟合两种方法,以四参数法在国内用的较多。
四参数计算至少要有2个已知平面直角坐标点,四参数公式如下:
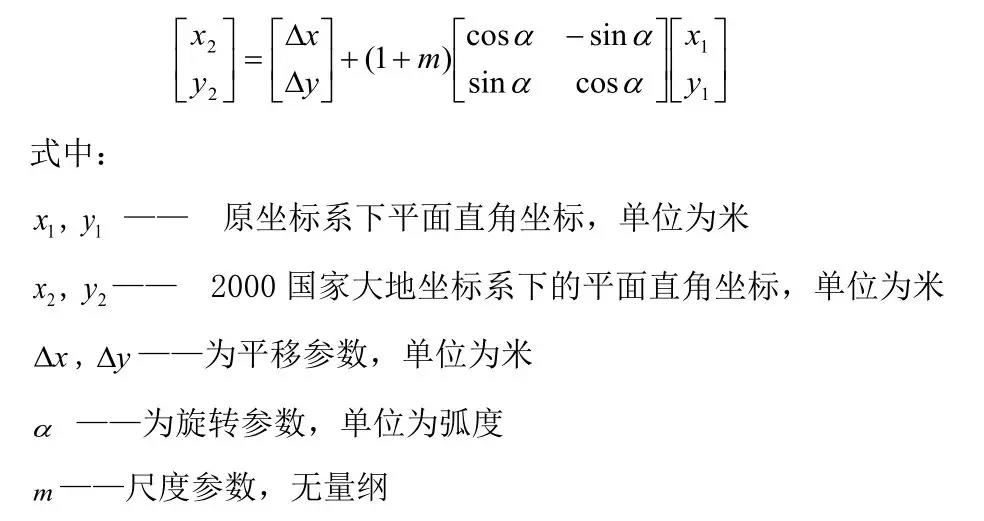
在该公式中有四个未知参数,即:
(1)两个坐标平移量(△X,△Y),即两个平面坐标系的坐标原点之间的坐标差值。
(2)平面坐标轴的旋转角度A,通过旋转一个角度,可以使两个坐标系的X和Y轴重合在一起。
(3)尺度因子K,即两个坐标系内的同一段直线的长度比值,实现尺度的比例转换。通常K值几乎等于1。
四参数的数学含义是:用含有四个参数的方程表示因变量(y)随自变量(x)变化的规律。
具体实现过程中,一般不会只有两个已知点,因此四参数求解出来之后,需要把X、Y的中误差以及每个点的X残差和Y残差,如果残差大于3倍中误差则将该点剔除,重新计算四参数。
五、高程拟合
5.1 高程拟合简介
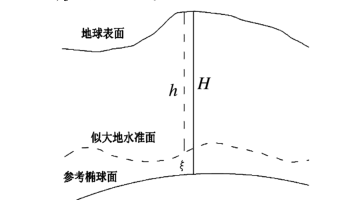
通过GPS相对定位得到的三维基线向 量进行网平差, 可得到高精度的大地高,但在实际应用中采用的是正常高,大地高是以椭球面为基准的高程系统, 而正常高是以似大地水准面为基准。GPS数据处理需要确定各未知点的大地高 H与正常高程h之间的关系,然后,用一定方法将大地高H转换为正常高h。大地高与正常高的关系为:
ξ = H - h
式中, ξ 为高程异常。
显然,能够精确求出各未知点的高程异常ξ,就能够通过大地高求出各点的正常高。精确计算各未知点的高程异常,主要有重力场模型和GPS高程拟合两种方法。
小区域范围内,常采用GPS高程拟合的方法计算GPS点的正常高,主要的拟合法有等值线图示法、狭长带状区域线性拟合法、解析内插法、曲面拟合法(包含多项式曲线拟合法、平面拟合法、移动曲面法)、固定差改正法等。一般基于使用便捷的考虑,常用的GPS高程拟合方法有二次曲面拟合法、平面拟合和固定差改正。
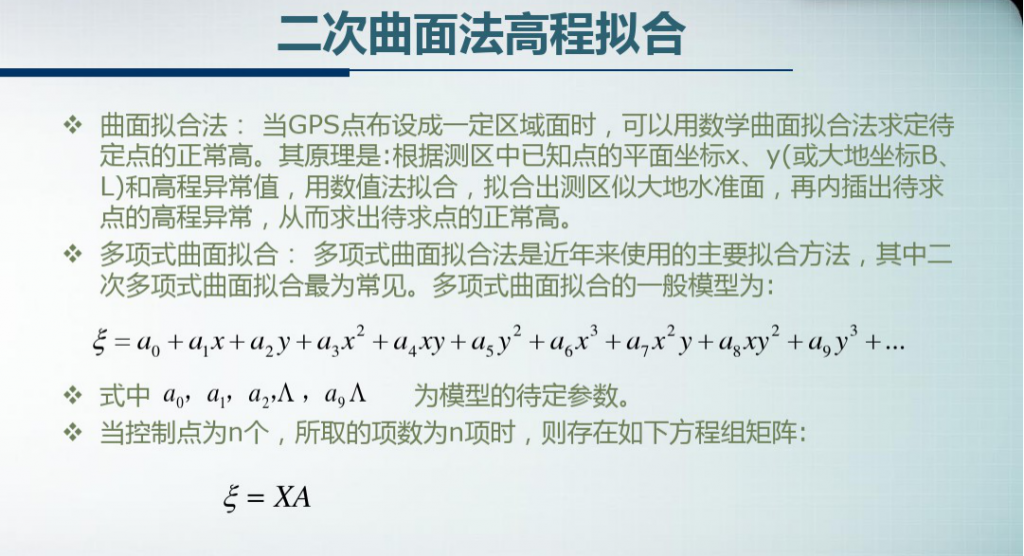
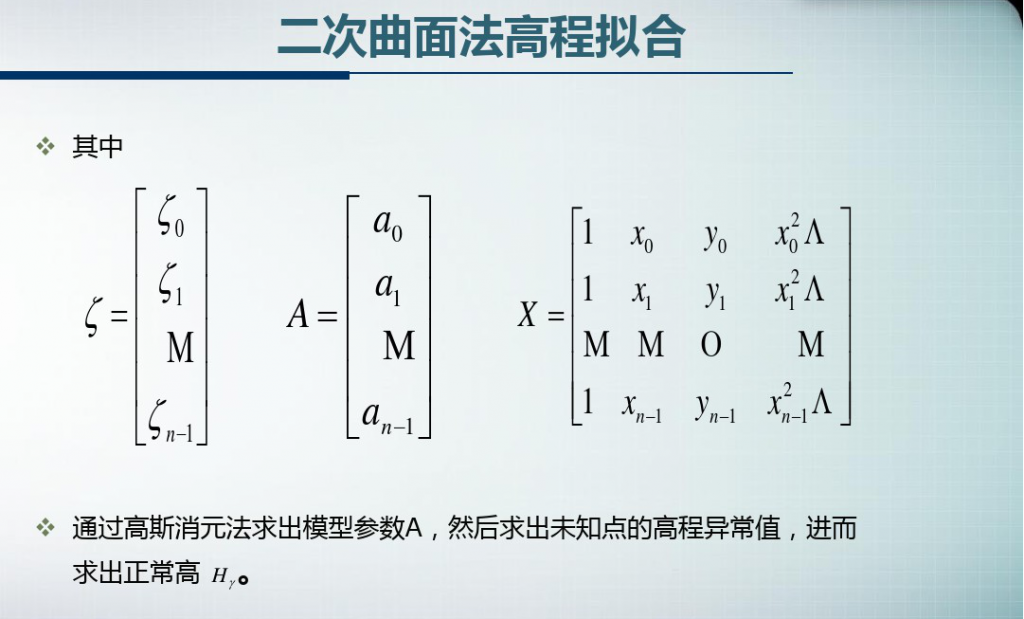
5.2 二次曲面拟合法
5.3 平面拟合
在小区域内,利用平面逼近局部似大地水准面来代替曲面,设公共点的高程异常为ξi,相应平面坐标为(xi,yi) ,则有

计算方法与二次曲面拟合相同,只是至少需要3个公共点的高程异常ξi和平面坐标(xi,yi)来求解式中的3个未知参数。由于平面拟合法是利用平面局部逼近似大地水准面,该方法适合在小区域且较为平坦的范围内使用。
5.4 固定差改正
固定差改正法高程平差计算是利用GPS计算的已知点大地高H与该点的正常高h,采用公式ξ=H-h ,计算各已知点高程异常值ξ,然后取其平均值,作为未知点的高程异常值,从而利用h=H-ξ来计算各个未知点的正常高。
固定差改正方法不够严密,谈不上是拟合高程,连最早的绘等值线图法内插的精度都达不到。直接将未知点的自由网平差的高程全部统一减去一个常数( 已 知点高程差值的算术平均值)而得到二维约束平差的高程,显然得到的高程精度不会很高。
5.5 移动曲面拟合法
移动曲面拟合法是一种局部逼近法,其基本思想是以一个内插点为中心,利用内插点周围数据点的值,建立一个拟合曲面,使其到各个数据点的距离之加权平方和为极小,而这个曲面在内插点上的值就是所求的内插值。
设P为内插的点,下面对P构造相应的曲面。本文取如下的二次多项式曲面为例:

设选取数据点的坐标为(xi,yi),i=1,2,…,n;n大于等于6且内插点P的坐标为(xp,yp),将(xi,yi)改化到以P为原点的局部坐标系中,即:
形成新的坐标
为移动坐标。
任一点数据(xi,yi)假设距离d的递减函数为:

将w(d)作为权函数,对每个数据点赋予权wi,这里wi不是代表数据点的观测精度,而是反映该点与内插点的相关程度的大小,因此,权wi确定的原则应该是与该数据点和内插点的距离di有关,di越小,对内插点的影响越大,则权越大,反之同理。
最后,由最小二乘法解如下带权的极小值问题:
为了给出下面这个二次多项式曲面

的系数,需要选取P点周围的数据点。当点数不够多时,则应扩大R的值。假设有n个数据点的值,可得到如下的方程式:

由此得系数ai=(i=1,2,…,n),从而得到所对应的的二次曲面方程,进而得到所求内插点的高程异常值。
5.6 中误差评定
已知点高程中误差是利用自由网平差中得到的高程减去已知点高程得到的差值,然后取其差值的算术平均值,再将各个已知点的差值减去该算术平均值,然后取其绝对值作为该已知点的高程中误差。而未知点的高程中误差评定是通过使用不同数量的已知高程控制点进行平差计算结果统计分析,最后得出未知点高程中误差是采用已知点高程中误差下式计算而得:
式中,M是未知点中误差,单位为mm;V是已知点中误差,单位为mm;n是已知点个数。从上式中可知:当只有1个已知高程点时,计算的未知点中误差为 0;有2个已知高程点时,计算的未知点中误差就是已知点中误差的平均数, 且已知点和未知点中误差相同;有3个以上的已知高程点时,计算的未知点中误差随已知点数量的增加而减小。已知高程控制点数量越多精度越高。